近日,清华大学交叉信息研究院陈建宇助理教授研究组与星动纪元合作完成的《进阶人形机器人运动控制:透过去噪世界模型学习掌握具有挑战性的地形》(Advancing Humanoid Locomotion: Mastering Challenging Terrains with Denoising World Model Learning(DWL))获得机器人领域难度最高的顶会Robotics: Science and Systems 2024年杰出论文奖入围(共三篇)。该会议于2024 年7 月15 日至19 日在荷兰代尔夫特理工大学举办,获得此项荣誉的论文比例不到投稿总数的1%。

图1: 颁奖典礼现场
现代环境设计以人类需求和能力为核心,人形机器人因其类似人类骨骼结构在移动性方面展现显著优势。传统步态控制技术如零力矩点(ZMP)、模型预测控制(MPC)和全身控制(WBC)取得了进展,但受限于环境动力学的精确建模。相对而言,强化学习(RL)对环境建模的需求较低,近期无模型RL的进展展示了创建普适性腿部运动控制器的潜力,使机器人能从多样环境中学习并适应,性能常超越传统模型控制方法。
为应对人形机器人控制的挑战,陈建宇助理教授团队提出去噪世界模型学习(DWL)技术,优化机器人在复杂地形中的能力。DWL已在小星(XBot-S)及小星max(XBot-L)上验证,全球首次实现端到端RL和零样本仿真到现实转换,使机器人在包括雪地倾斜面、楼梯等地形上稳定行走,抵抗外部干扰。DWL的成功归功于其创新的表示学习框架,通过去噪缩小仿真与现实的差距,并提出了主动2-自由度踝关节(闭环运动链踝机制)的控制方法,显著增强了机器人的鲁棒性。
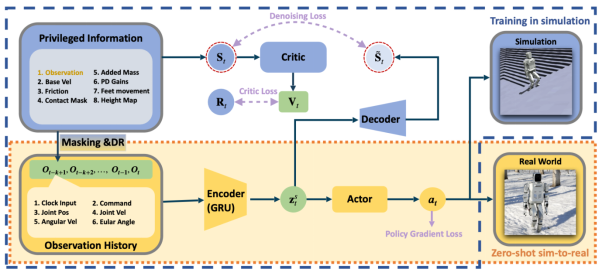
图2: DWL算法过程。
此项工作由陈建宇助理教授研究组与星动纪元合作完成。该论文的通讯作者是清华大学交叉信息研究院的陈建宇助理教授。共同第一作者包括交叉信息研究院2021级硕士毕业生王彦仁、2021级博士生朱翔、2023级博士生施铖铭,以及星动纪元的工程师Xinyang Gu。其他作者包括交叉信息院2022级博士生郭彦江和刘翊臣。
图3:会议上的演讲,右起交叉信息研究院2021级硕士毕业生王彦仁、星动纪元工程师Xinyang Gu。
会议简介
Robotics: Science and Systems (RSS) 是机器人学领域的顶级学术会议,汇集了全球领先的研究人员和专家,展示最新的研究成果和技术创新。RSS会议涵盖了广泛的机器人学主题,包括但不限于机器人感知、运动规划、控制系统、人机交互、机器学习在机器人中的应用以及多机器人系统等。会议以其严格的审稿标准和高质量的论文而闻名,是推动机器人学研究和技术进步的重要平台。
论文链接:https://roboticsconference.org/program/papers/58/
编辑|姜月亮
审核|吕厦敏
