数万年来,为了繁衍生息,植物可谓费尽心思。除了靠水,靠动物,靠自身喷射播撒种子,还有一些植物演化出了适宜飞翔的种子特殊构造,将果实带到离母树很远的地方。这类种子被称为翅果或翼果,在一颗小小的种子上方,由纤维组织构成的薄翼形成升力,在空气动力学的作用下可抵达几十公里,甚至上百公里的远方。
世界上的翅果形态各异,包括单侧、蝶翅、圆翅、披针、棱翅、苞翅等。人类能否运用人工智能(AI)自动生成新形态的翅果?人造翅果的空气动力学性能是否可以超越自然翅果?人造翅果有哪些实际应用和探索方向?受好奇心驱使,清华大学交叉信息研究院杜韬助理教授研究组结合计算机图形学与机器学习技术,对翅果的形态和性能进行了探索。近期,该研究成果Computational Biomimetics of Winged Seeds被计算机图形学顶级期刊 ACM Transactions on Graphics接收,并将在计算机图形学顶级会议ACM SIGGRAPH Asia 2024上报告。

图|翅果数据集
1. 如何运用AI自动生成高性能的人工翅果?
在全球人工智能驱动的科学研究(AI for Science)极速发展的背景下,人工智能技术与植物学、生态学等领域深度交叉融合,拓展着科学探索的边界。近期,杜韬研究组基于人工智能与生物仿生技术,构建了一套能够自动进行翅果形态设计、飞行仿真、性能优化的计算仿生学流程,为人造翅果的形态和性能探索提供了新方案。
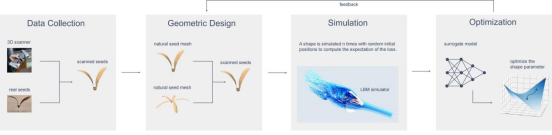
图|流程示意图
自动化翅果形态设计
若想借助AI自动设计种子的形态,核心挑战是如何让计算机理解种子的生成原理和路径。为解决这一问题,不仅需要高质量的数据集,更需要一套算法模型。
研究组首先构建了一个翅果种子数据集。论文合作者、交叉信息研究院2021级本科生卜佳木回忆说:“我们在收集高质量翅果时费了不少功夫。网店上的种子通常以播种为目的,绝大部分的形态都不完整导致无法进行研究。后来,我们了解到云南西双版纳翅果资源较为丰富,在网上联系到一些当地供货商买到了需要的翅果样本。”随后,研究组利用清华大学基础工业训练中心提供的手持式三维扫描仪对每一颗翅果进行了三维数字重建,经过处理后形成了包含55枚种子三维样本的数据集。这些种子横跨14个物种,保证形态的多样性。
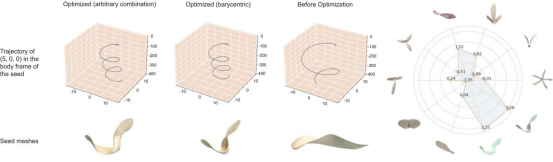
在构建算法方面,研究者借助对生物演化的观察,利用三维微分同胚群和测地坐标等数学工具对种子形状进行理解和生成。杜韬助理教授解读说:“收集到的翅果与圆片有同样的拓扑结构。从自然演化的角度,我们假想每个收集到的翅果都是由圆片演化而来,只是在演化过程中选择了不同的路径。受此启发,我们基于一些对演化路径的数学和生物假设,为每一种翅果解算了一条从圆片开始的光滑变换,随后在光滑变换中进行差值,融合出大量新的演化路径,探索出了许多全新的翅果形态。”

图|3D微分拓扑群上的测地坐标
论文第一作者、研究组成员乐齐钦研究员进一步给出了这一方案的理论支撑:“数理生物学的先驱、著名生物学家Darcy Thompson曾在《生长与形态》一书中提出,生物进化都可以通过连续形变模拟出来。这一思想已在生物学和医学领域成功探索,但还较少运用于设计。于是我们进行了大胆尝试,通过复现和叠加种子生长趋势的方式,生成了一系列翅果形态,包括一些地球上目前可能都找不到的新样式。”
量化翅果飞行轨迹
计算翅果的飞行轨迹是优化人造翅果空气动力学性能的前提。研究组选用格子玻尔兹曼方法(Lattice Boltzmann Method)流体力学数值模拟器,基于随体坐标系对翅果的行动轨迹进行建模计算。随体坐标系跟随翅果一起运动,将翅果始终放在流体计算域的中心,能够经济地计算翅果附近空气的运动。
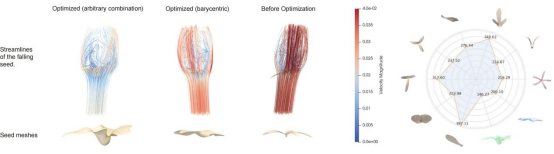
优化空气动力学性能
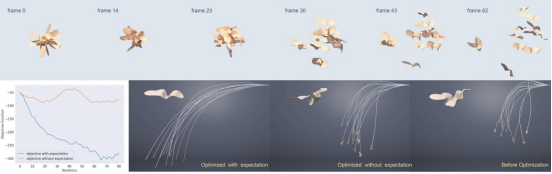
借助AI优化人造翅果空气动力学性能可以抽象为一个寻找优化目标函数最优解的过程,然而,由于流体自身的混沌性,通过流体仿真计算得到的目标函数能量景观(energy landscape)极不光滑,包含大量局部最优解,优化难度很大。乐齐钦介绍了论文中为了解决这个问题对目标函数进行的两种平滑处理:“第一,我们借鉴了强化学习中利用概率分布描述系统初始状态的理念,来描述翅果的初始位姿并将目标函数的期望作为优化对象,更好地刻画了真实翅果从植物上脱落时位姿的随机性。第二,我们借鉴图形学领域最新的优化方案训练了一个神经网络模型,局部拟合了翅果的形态空间到目标函数空间的映射。我们观察到拟合后神经网络的能量景观保留了目标函数的变化趋势,但更加平滑,是很好的优化对象。”
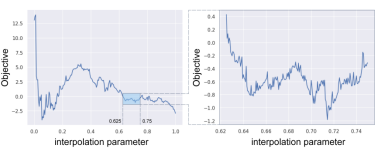
图|函数能量景观
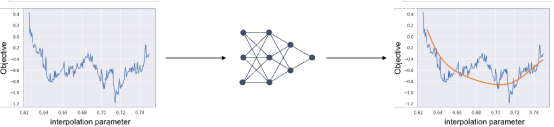
图|神经网络平滑近似后的优化函数能量景观
2. 人工翅果的空气动力学性能是否可以超越自然翅果?
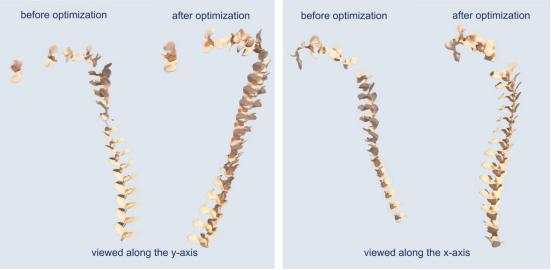
为检验方法的有效性,研究者分别对比了自然翅果和优化后人造翅果在自旋速度、下落速度、飞行距离及飞行轨迹方面的表现。
自旋速度对翅果传播有重要影响。旋起来的翅果像竹蜻蜓或螺旋桨,转速越高产生的升力越强,种子在空中停留的时间就越长,也就更有可能传播至更远的地方。研究组不仅在仿真器中进行了转速实验,也使用常见材料制作了优化前后的翅果实物模型,检验它们在空气中的真实性能。在仿真实验中,优化后的翅果转速提升了约29%。而在五次空气中的飞行测试中,优化后的翅果转速提升了27.6%到50%。
图|转速优化仿真实验

图|转速优化飞行测试
下落速度和飞行距离同样影响翅果的传播效果,在两组特定场景的仿真实验中,人造翅果和天然翅果相比下落时间更长,飞行距离更远,潜在的传播范围更广。
图|转速优化飞行测试
图|飞行距离仿真实验
研究组还特别设计了“回旋镖”实验,用于寻找能自动飞回抛出点的翅果形态。论文合作者、北京大学物理学院2024届本科毕业生瞿言科同学表示:“回旋镖实验主要出于实际应用的考虑,尝试解决微型飞行器可回收性的问题。”
图|“回旋镖”仿真实验
3. 人造翅果有哪些实际应用和探索方向?
人造翅果的实际应用值得憧憬。这些微型机器人不仅能够抵达人类难以触及的地区进行空中播撒,比如将肥料和药品携带至山林,助力植被恢复,减少山体滑坡;还可以植入芯片和传感器,用于环境监测和自然勘探。
中国农业大学植物病理学教授王琦表示:“这项研究为我带来诸多惊喜。在植物演化学植物器官形态结构方向的探究中,研究团队着重对翅果特征展开剖析,并将其巧妙应用于仿生飞行器设计,提供了一种极具创新性的植物仿生学研究途径,有力推动了植物仿生学的发展与应用。该研究融合植物仿生学与计算机技术,充分借鉴植物演化智慧,成功研发出飞行性能优于自然界翅果的仿生飞行器模型。通过算法优化及人工智能设计,不仅提炼出植物翅果经漫长演化在空气动力学方面产生的独特优势,还基于此创造出在某些空气动力学参数上更优的仿生飞行器设计方案。基于此研究成果转化落地创制新型仿生飞行器,可对农用无人机进行改进,提高无人机播种、施肥、喷药等农事操作效率,形成农业新质生产力,助力我国粮食安全和生态安全的保障。”
对未来的探索,研究组成员也有诸多设想。乐齐钦感到:“AI for Science的应用极为宽广,未来也期待探索其它生物结构的建模和优化。”卜佳木说:“目前的人造翅果更像一个被动飞行器,未来还可以加入控制系统,让人造翅果能够控制自己的方向和平衡。”瞿言科表示:“自然界中的种子形态仍受到许多因素的限制,未来也许可以通过拓扑优化设计出更多自然界中难以演化出来的形态。”
作者简介
论文第一作者为杜韬研究组成员、上海期智研究院研究员乐齐钦,通讯作者为清华大学交叉信息院杜韬助理教授。其他作者包括清华大学交叉信息院2021级姚班本科生卜佳木,北京大学物理学院2024届本科毕业生、现清华大学交叉信息研究院2024级博士生瞿言科,以及美国佐治亚理工学院Bo Zhu助理教授。本工作受到了清华大学和上海期智研究院的支持与资助。
研究组简介
杜韬,现任清华大学交叉信息研究院助理教授、博士生导师。博士毕业于麻省理工学院计算机图形学实验室,主要研究方向为计算设计与物理仿真。主要工作多次发表在计算机图形学领域顶级期刊和会议上,其中的代表性工作被WIRED和MIT News等多家知名科技媒体报道。更多信息请访问学术主页https://people.iiis.tsinghua.edu.cn/~taodu/。
论文链接:
https://people.iiis.tsinghua.edu.cn/~taodu/seed/le2024computational.pdf
编辑、制作|姜月亮
审核|吕厦敏
